|
Different types of outputs
In robotics we deal with various types of IC's that communicate
with the external world via their pins. Here we shall talk about
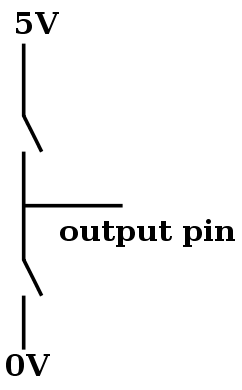
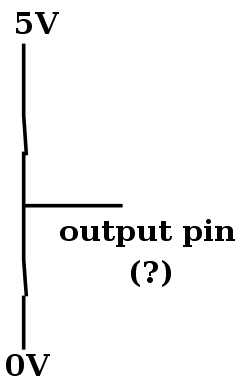
the output pins. Behind each output pin there is a circuit like
this:
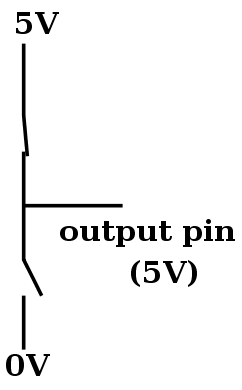
If the top switch is closed, and bottom switch open, then the
outpin pin is at 5V, as shown below.
Whether this means 1 or 0 in binary depends
on the logic of the particular pin. In ordinary logic 5V denotes
1, and 0V denotes 0. In reverse logic it means the other way
around. The datasheet of the IC clearly states the loic of each
pin.
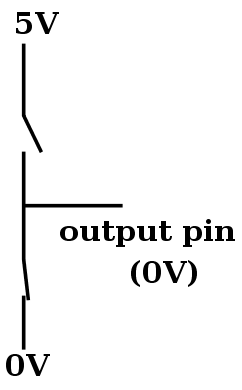
If we close the bottom switch and open the top one, then the pin
goes to the 0V state.
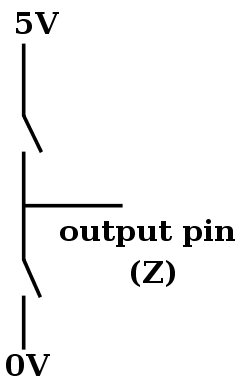
If we keep both the switches open, then we are in the so
called high impedance state (often denoted by the
letter Z). In this state the pin is eseentially
disconnected from the circuit, and is just like a piece of wire
lying on your table.
What will happen if you close both the switches as in the following?
Here the two power rails are shorted, and so this situation must
be avoided. No, you do not have to worry about avoiding this. The
manufacturers of the IC have taken care of it!
The top switch is often called active pull up, while the
bottom one is called active pull down. Thus our circuit
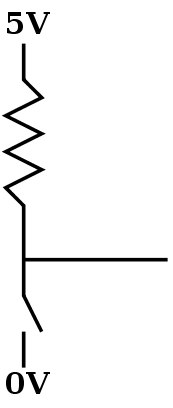
has both active pull up and active pull down. Contrast this with
the following circuit which has passive pull up and active
pull down.
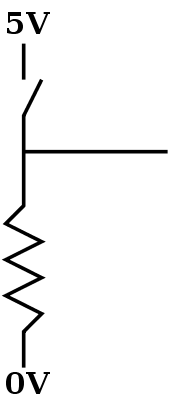
Similarly we could have passive pull down and active pull
up like this.
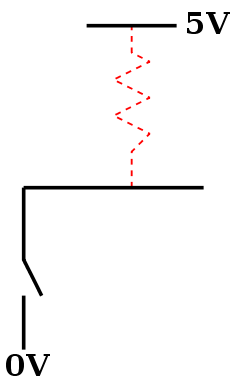
A popular variant is where the "pull up" is missing:
An output pin controlled by such a circuit is called an open
collector pin. Here the user is expected to provide a
passive pull up from outside. Never use active pull up, as then
you run the risk of shorting the power rails!
|