Multivariate statistics is a computation intensive branch of
statistics. Unbearably slow computation and running out of space
are nagging problems whenever we want to deal with large high
dimensional data.
There are a number of popular ways out of these problems:
Modify the algorithm mathematically: We have already
seen an example of this when we ran out of memory during PCA of
the face data. There we performed eigenanalysis of YY'
instead of the much larger Y'Y. We used the fact the
nonzero eigenvalues are the same for both, and the
corresponding eigenvectors are also related. Unfortunately, such tricks
are not always available.
Use some lower level language: Languages like R or
Matlab often add extra layers of bookkeeping and/or memory
restrictions. So implementing a computation intensive algorithm
in C is often a way out. But remember that most R packages are
already written in C, and so if an R package runs too slow, then
rewriting the algorithm in C may not help much.
Use harddrive-mapped RAM: This is a popular solution for
space crunch. It makes the program run slower, but allows much
larger data sets. The SAS software uses this technique very
efficiently. Here the idea is that space crunch comes from
shortage of RAM and not shortage of harddrive (you can easily
add an external harddrive). If we keep our variables mostly in
harddrive, and load only a small part of it into RM during each
step of the computation, then we can by-pass the shortage of
RAM. Of course, this calls for redesigning the algorithm so that
only a small part of data is used in each step.
Parallel processing: This is a solution for time
crunch. Modern CPU's are getting faster and cheaper. But the rate
at which they are getting cheaper is more than the rate of
getting faster. So it is easier to get 10 CPU's
than one CPU that is 10 times faster. Parallel processing tries
to get the benefit of the latter using the former. Parallel
processing comes in two flavours:
Distributed computing:
Here we use a cluster of computers networked together. Each
computer is a traditional one with a single CPU.
Multicore processors: Here a single computer actually
comes with multiple CPU's (eg, dual-core or 4-core etc).
In either case we use a techique called Map-Reduce. This
requires redesigning the algorithm such that different parts may
be run in parallel. Then the Map phase delegates the parts to the
individual CPU's. The results of the CPU's are combined to
produce the final output in the Reduce phase. Not all algorithms
are amenable to such Map-Reduce-friendly redesigning.
Map-Reduce-ability is definitely a good quality that modern
algorithm designers want to achieve.
A simple example is provided by the PCA face recognition
problem. There we had to compute a large matrix
product YY'. If we partition Y as
Y = [ Y1 Y2 Y3 Y4 Y5 ]
then
YY' = ∑i Yi Y'_i
In the Map phase we can delegate the computation of each summand
to a separate CPU, and perform the addition in the Reduce
phase. There are many softwares to perform Map-Reduce. The most
notable being HADOOP. It is a free software provided by Apache. R
has a package that talks to HADOOP.
k-nearest neighbour method
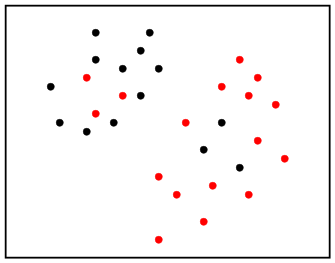
Consider a simple classification rule: given a fresh
point x consider all the training points in
its ε-neighbourhood and classify the new point by
majority vote. Let's see the role of ε here. Take
the data set:
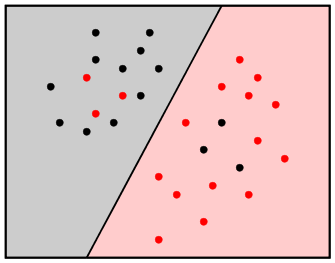
A typical ideal classification could be like this:
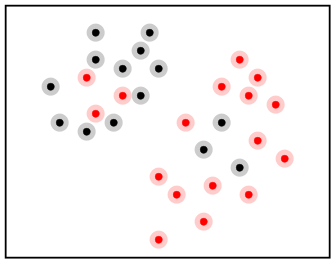
But if we use too small an ε, (say smaller than the
smallest distance between two training points) then we shall get
a classification like this. Each point forms an island of its
own. If the new point lies outside all the islands, then our
simple algorithm cannot even be applied! Obviously such
an ε is a bad choice.
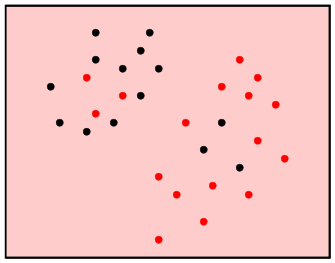
If we take ε too large, then the neighbourhood
will contain all the training points. So we shall have
only one class, the majority class.
Of course, we can avoid these bad extremes by
choosing a medium-sized ε. Now consider the
situation where the dimension is large. If we use Euclidean
distance (d2) then we have seen in the first class that
the neighbourhood volume shrinks to 0. So we shall be in a
situation like the first. If we use d∞ distance,
then the neighbourhood grows to ∞ in volume and so we
end up being in the other extreme. Thus choice of ε
as well as the metric becomes tricky as dimension grows.
A simple remedy is not to choose an ε beforehand,
but to consider a neighbourhood (wrt d2, say) just large enough to
contain k training points. Here k is a tuning
parameter. This approach is called the k-nearest neighbour method.
Support Vector Machine
Our main reference for this part is the book
Support Vector
Machines
Optimization Based Theory,
Algorithms, and Extensions
by
Naiyang Deng,
Yingjie Tian
Chunhua Zhang.
A softcopy may be downloaded here.
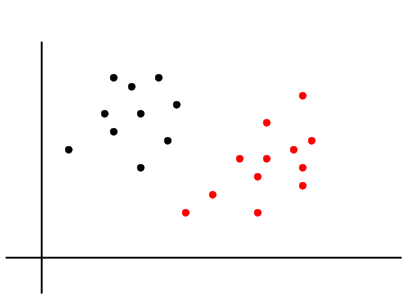
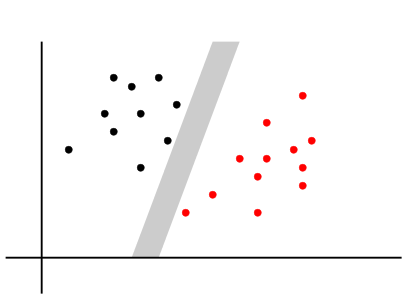
We start with an example. Consider a bivariate case with just two classes as show below.
Two classes
Clearly the classes can be separted by a line. There are
infinitely mny such lines. We want to choose the "best". First we
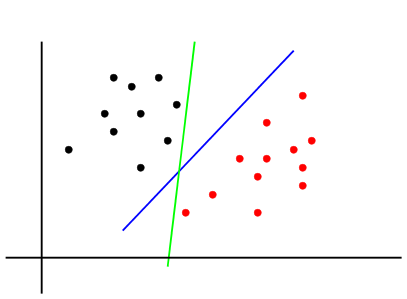
need to decide upon a definition for "best". Consider the two
candidate lines shown below. Both separate the two
classes. Intuitively, which one do you think is better?
Which line is the better separator?
For the training data both are perfect, ie, the resubstotuion
error is 0 for both. But imagine trying to classify fresh
data. The green line is so close to the classes that a fresh
point near a class may easily fall on the wrong side of the green
line. But the blue line is farther away from both classes. Thus
the blue one is better.
The fresh points (shown in grey) are
misclassified by the green line.
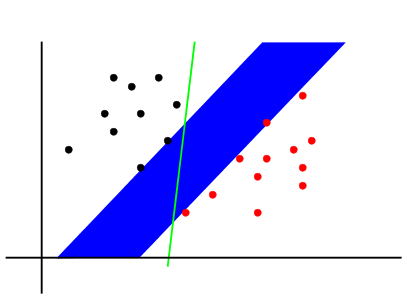
So one way to measure the "goodness of separation" by a line is to see how
far the line is from training points of both the classes. It will
help to think about wide strips instead of lines. The wider a
strip the happier we are.
Wider strips provide better separation
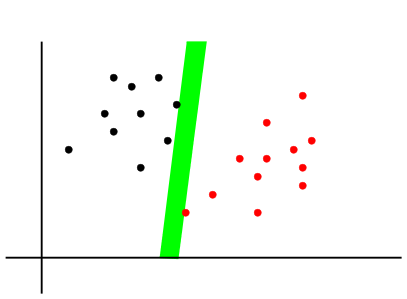
The blue strip above is wider than the green strip below.
Narrower strips provide worse
separation
So instead of lines, let us now look for widest possible strips
separating the training points from the two classes. Here is a a
typical strip.
A typical (non-maximal) strip
Obviously, this strip cannot be optimal, because it has not
touched any point yet. So we can fatten it further:
A maximal strip (the best for its
slope)
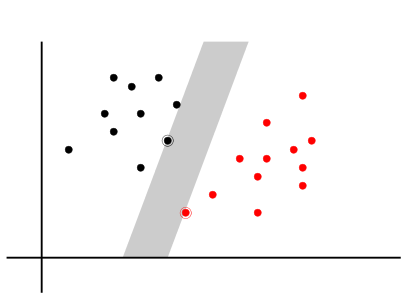
When it hits at least one point on either side, we have achieved
the best we can for strips of this slope. The points it hits on
either side are called the support vectors. There could be
more than one support vectors on either side.
So now we want to solve the optimisation problem:
Maximise width among all strips that separate the training points
of the two classes.
We need to cast it in the language of mathematics before we can
hope to solve this problem. This requires 3 steps:
Expressing a "strip"
mathematically,
Finding the width in terms of our mathematical expression,
Expressing the condition that the strip separates the
training points from the two classes.
Step 1: How to express a "strip"
mathematically?
One way is by specifying the two boundaries,
which are parallel lines. So we need to specify the common slope
and the two intercepts. But since we want to allow the strip to
be vertical (for which the slope is undefined), a better method
is to use the form
w1 x1 + w2 x2 + b = 0.
for a line. Then we need to specify w1,w_2 for the common
slope, and two values for b corresponding to the two
boundaries. So 4 things are to be specified. We can reduce
the number to 3 as follows. Let the two boundaries be
Let's call the b-1 line the "positive" boundary, and
the b+1 line the "negative" boundary.
Convince yourself that any strip can be expressed like
this uniquely, once it is decided which boundary is
to be negative (or positive).
Example:If the positive
boundary is y = x+10 and the negative boundary is y= x
+ 20, then write them as
y - x - 10 = 0,
y - x - 20 = 0.
Now divide them by 5 (to make the intercept difference
come down to 2):
0.2 y - 0.2 x - 2 = 0,
0.2 y - 0.2 x - 4 = 0.
We need the positive boundary to have the smaller constant term, so
change sign:
-0.2 y + 0.2 x + 2 = 0,
-0.2 y + 0.2 x + 4 = 0.
This may be expressed as
-0.2 y + 0.2 x + (3-1) = 0,
-0.2 y + 0.2 x + (3+1) = 0.
So we can take w1 = -0.2, w2 = 0.2
and b=3.◼
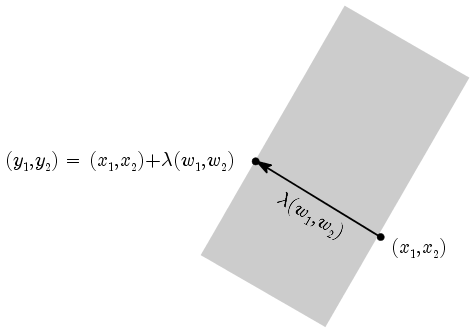
Step 2: Finding the width of strip given by (w,b)
The next step is to find the width of a strip given by w = ( w1 ,
w2 ) and b. For this we notice that if we draw a vector
perpendicularly across the strip then it is along the direction
of ( w1 , w2 ). Now take a point ( x1 , x2 ) on one boundary, say
the negative boundary, and drop a perpendicular upon the other
boundary. See the diagram below.
Finding the width of a strip
The foot of the perpendicular satisfies the equation of the other
boundry. If you do the computation, you'll see that ( x1 ,
x2 ) will cancel out, and you'll be left with a value
for λ in terms of ( w1 , w2 ). (The
number b will not play any role here.) A few simple steps
will show that maximising the width is equivalent to minimising
the length of ( w1 , w2 ).
Step 3: Express the separation condition
The final step is to mathematically express the condition: the
strip separates the training points of the two classes. For this
it will help to define a variable y which takes the
value -1 for one class (the "negative" class, say), and 1 for the "positive"
class. Thus yi = -1 means the i-th training point
is in the negative class, and yi = 1 means that it is in the
positive class. Then convince yourself that the condition
"all training points from the negative class are beyond the
negative boundary of the strip, and all the training points from
the positive class are beyond the positive boundary of the strip"
can be expressed as
∀ i
if yi = 1 then (w1 x1i + w2 x2i + b) ≥
1
and
if yi = -1 then (w1 x1i + w2 x2i + b) ≤
1
These two cases may be conveniently combined into a single
condition:
∀ i yi (w1 x1i + w2 x2i + b) ≥ 1.
Now that the three steps are over,
our optimisation problem is that of finding ( w1 , w2
) and b to
min w'w subject to ∀ i yi (w1 x1i + w2 x2i + b) ≥ 1.
This is a quadratic programming problem and hence can be solved
efficiently.
Hard and soft margin cases
So far we were assuming that the training points of the two
classes were linearly separable (i.e., could be separated by a
line). This is not the general case.
If we have such a situation then we have to allow strips that
allows some points to cross boundaries, i.e., allowing
∀ i yi (w1 x1i + w2 x2i + b) < 1.
Of course we do not allow this "too much". We measure the
"badness" of the strip w.r.t. the i-th point by
(1 - yi (w1 x1i + w2 x2i + b))+ .
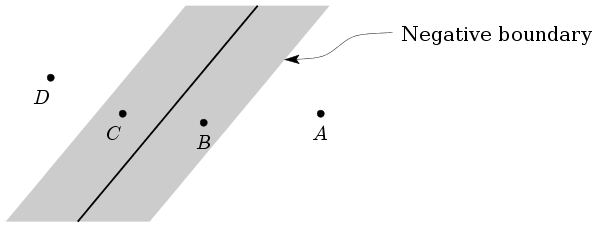
Consider the following diagram where we have shown 4
training points from the negative class.
Gradation of "badness"
Point A is beyond the negative boundary of the strip, so
nothing to worry about. Point B is on the correct side of
the medial line of the strip (so it is correctly classified) but
still we feel unhappy since it has come inside the
strip. The cases for points C and D are even more
serious, as both of them are misclassified. The case of D
is the worst.
So we may now look for a strip that is wide as well as the total
"badness" is low. As you can guess, these are qualities of
opposing nature, and we have to look for a trade-off. Any such
trade-off must start by bringing the two qualities on a common
denominator (i.e., by answering a question like: How much badness
are we willing to tolerate to increase the width by one unit?)
For this we introduce a cost parameter C, and
minimise
w'w + C ∑ (1 - yi (w1 x1i + w2 x2i + b))+ .
Also here
we have to optimise over all strips. This is
called soft margin SVM. As C increases we approach
case discussed earlier: hard margin SVM.
Notice that even here we have a convex programming problem,
and so have an efficient solution.